UAV image acquisition employs a CCO (Cross-Complementary Overlap) flight path design strategy. This strategy enhances viewpoint diversity through multi-directional cross-flight paths to strengthen geometric constraints for 3D reconstruction.
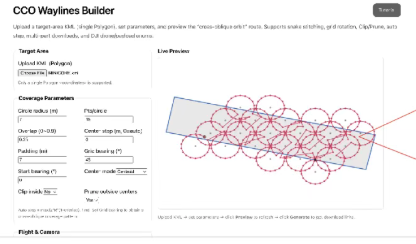
- Multi sets of flight paths in different directions: Ensures multi-angle capture of crop canopy structure
- Forward and side overlap rates higher than conventional orthophoto requirements: Provides sufficient matching points for SfM reconstruction
- Image acquisition primarily serves 3D reconstruction goals: Rather than only satisfying orthophoto mosaic requirements
Based on industry-grade UAV platforms, multi-view RGB images of farmland are collected to provide unified data sources for subsequent orthophoto mosaic and 3D modeling.